就像剛要練習的小雛鳥一樣,只要足夠堅定,一定就能飛起來
在這整段學習日記裡,小編終於還是踏上了Pixhawk之路,看看初次接觸Pixhawk的菜鳥Maker(指的就是小編本人),可能會碰到哪些問題,並將過程寫成分享心得文,希望能幫助更多想加入的Maker大家庭的你們!
首先看一下買回來的這陀零件有什麼,順便介紹一下,組裝一台完整的多旋翼無人飛行器,需要有哪些東西!

3DR Pixhawk飛控板-之前有使用過APM,APM的CPU是8bit運算,目前的硬體技術已算是APM的極限,而Pixhawk的32bit運算還有很大的發展空間,因此有越來越多人開始使用Pixhawk。

遙控器及接收機-遙控器和接收機是一定要有的,不然要怎麼控制呢?小編使用的是Futaba 10通道遙控器及Futaba副廠的8通道接收機。


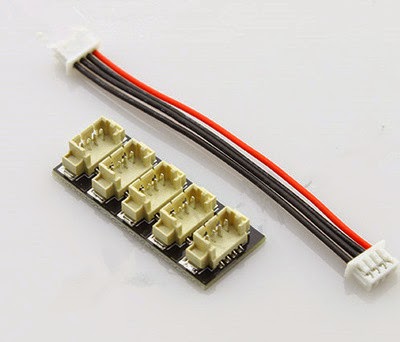
八通道PPM編碼器- Pixhawk只接受PPM訊號,所以傳統的接收機必須先轉成PPM訊號才能被Pixhawk使用,像小編現在使用的這顆TFR 8通道接收機,就需要接上PPM編碼器。

3DR Radio-主要用於數據傳輸,3DR有賣433MHz和915MHz兩種頻段。選擇915MHz是因為和其他頻段比起來相對的乾淨些,比較不會被干擾,而且915MHz在使用上的距離也能到達1公里,對小編這個菜鳥新手來說已經很夠用了。

安全開關- Pixhawk和APM不太一樣,多了一道安全開關,沒有打開是無法進行解鎖的!

GPS&羅盤- 定點飛行、返航、航點飛行…等功能都需要用到GPS和羅盤,既然要做飛行器,怎麼能少了自主飛行這麼炫炮的功能呢!
I2C擴充板- 其實這個有或沒有都沒差,如果你的機身上想額外加光流之類的感測器,才需要再擴充I2C的插槽,不然只裝GPS的話,一個插槽就夠了。
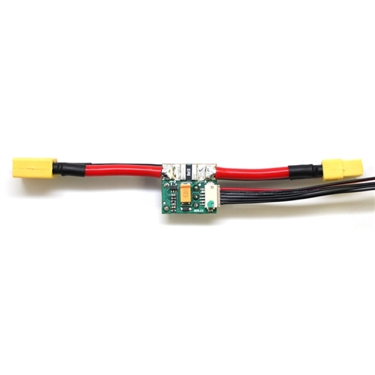
Power module-Pixhawk支援電壓量測,且硬體上的設計,Pixhawk吃5伏特的電,所以電裝須上power module來變壓。


馬達&電子變速器-馬達和電子變速器是拆Lab其他飛機上現有的,預估全機重1kg左右,在電流的消耗上30A的電變配750KV的馬達應該就足夠了,馬達與電變要如何搭配也是一門學問,之後再補發一篇做說明。※30A的電變指的是電子變速器輸出能力能持續電流30A
準備完以上,那麼Pixhawk新手組裝之路就正式開始啦,下篇文章會繼續紀錄在使用Pixhawk上的功能與筆記,如果你也是有興趣的學員或玩家們,小編很歡迎各界來交流哦!
