當飛行器不在只是玩具,而是可以貼近生活的事物。
在上篇文章中小編介紹了包含超音波、光強度、溫室度等三種擴充感測元件,而這次的學習日記要另外介紹其他三種可擴充元件,就讓小編繼續來為各位飛行玩家們一一介紹!
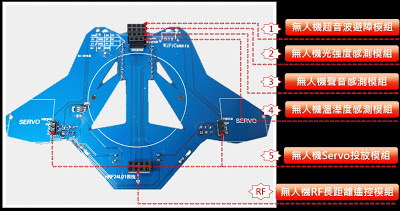
聲音感測
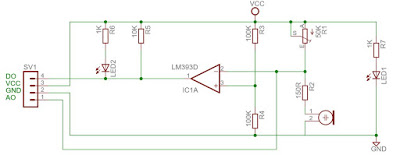
聲音感測器就類似一個電子式的耳朵,使用高靈敏度的電容式麥克風收音,產生不同的電壓訊號,一般用來檢測周遭的聲音強度。
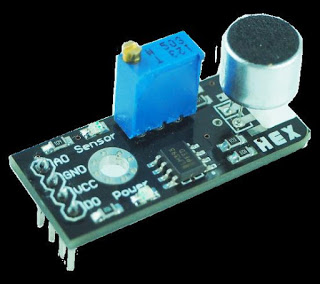
而輸出有兩種,第一種是可以隨著麥克風的電壓訊號實時輸出類比數字大小的類比輸出,另一種是當電壓高於某個閥值時切換高低電位的數位訊號輸出,當偵測到有音源輸出低電位開啟led燈提示,沒有感測到音源則輸出高電位關閉電源。
Arduino程式碼如下:
#define led A0
#define voice A1
int v=0;
void setup(){
Serial.begin(115200);
pinMode(led,OUTPUT);
pinMode(voice,INPUT);
}
void loop(){
digitalWrite(led,);
v=analogRead(voice);
Serial.println(v);
if(v>=250){
digitalWrite(led,LOW);
delay(2000);
}
}
Servo
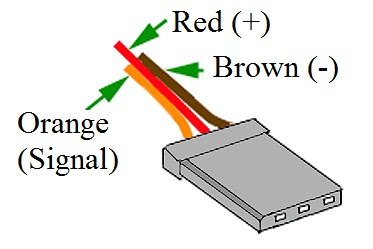
Servo中文叫做伺服馬達,做為一個常常使用於模型飛機的馬達所以也常被稱作RC伺服機(RC servo),伺服馬達裡是由直流馬達、齒輪箱、轉軸以及控制電路組成的模組,我們可以通過 Arduino輸入PWM 訊號到Servo中來操控轉軸的角度。

我們可以看到伺服馬達拉出棕紅橘三條杜邦線分別是代表接地(-)、電源(+)以及橘色的訊號線,在飛龍在天底部預留出伺服馬達的位置上,按照順序連接到GND、1S、A2 (左翼) or A3 (右翼) 腳位上即可使用。
Arduino程式碼如下:
#include <Servo.h>
Servo myservo;
int pos = 0;
void setup()
{
myservo.attach(A2);
}
void loop()
{
for(pos = 0; pos <= 180; pos += 1)
{
myservo.write(pos);
delay(15);
}
for(pos = 180; pos>=0; pos-=1)
{
myservo.write(pos);
delay(15);
}
}
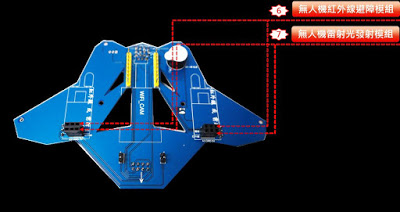
紅外線感測
紅外線模組具有一對紅外線發射與接收管,發射管發射出一定頻率的紅外線,當檢測方向遇到障礙物(反射面)時,紅外線反射回來被接收管接收,經過比較器電路處理之後,綠色指示燈會亮起,同時信號輸出接口輸出數字信號(一個低電平信號)。紅外線模組對於環境光線適應能力很強,不需要擔心會因為環境光的強弱受到干涉,並且可使用螺絲起子旋轉藍色電位器旋節檢測距離,有效距離範圍2〜30cm順時針旋轉感色距離加長反之則會縮短,實際測量距離與紅外線接觸到物體的大小、形狀有關係,測量黑色和較小物體時感測距離會比較近,而白色以及較大的物體可以感測的距離則會加長。

Arduino程式碼如下:
const int buttonPin = A2;
const int ledPin = 2;
int buttonState =0;
void setup() {
buttonState = digitalRead(buttonPin);
Serial.print(buttonState);
if (buttonState == HIGH) {
digitalWrite(ledPin,HIGH);
Serial.print(“0”);
}
else {
digitalWrite(ledPin, LOW);
Serial.print(“1”);
}
Serial.print(“\n”);
delay(100);
}
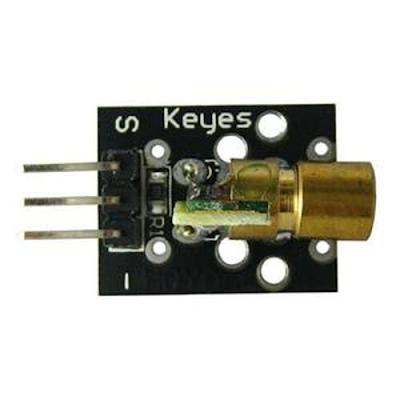
雷射發射器
最後小編要來介紹的就是無人機感測擴充包裡的最後一件,紅光雷射激光模組,在學校教學或是簡報的時候常常會需要用到雷射筆來標示PPT或是簡報內容的人,對於雷射一定不會很陌生,只要把紅外線模組擴充到飛龍在天上面,就可以讓它也擁有發射機光的能力哦~
Arduino程式碼如下:
void setup()
{
pinMode(A2,OUTPUT);
}
void loop()
{
digitalWrite(A2,HIGH);
delay(1000);
digitalWrite(A2,LOW);
delay(1000);
}
小編學習日記的DragonFly的外掛元件就寫到這裡了,學習了第二只飛行器,感慨的分享,科技不斷地在進步,不論如何,不害怕被取代,而是學習如何利用科技讓生活與社會變得更美好,或讓自己更進步一些些,與國際或外界更加接軌,其實不知不覺中,也會讓自己的生活更有趣了一點,歡迎大家有興趣來和我們交流哦!
