Arduino (Getting started)_ CoDrone Joystick Controls 控制CoDrone 操縱桿
Step 1:
| 催收油門、偏航、俯仰和橫滾
像是CoDrone一樣的飛行器與陸地上的汽車移動方式有點不同。儘管陸地車輛可以向前、向後,有時還可以左右移動,但飛行器還能做到上下移動。以下四個讓你了解CoDrone飛行方向的名詞: 橫滾、俯仰、偏航和催與收油門,你會在這堂課學到CoDrone怎麼用以上這些方式飛行。 |
Step 2:
| Roll橫滾
橫滾是無人機橫向或是側向傾斜移動。正向橫滾會讓無人機往右傾斜飛行,而負向橫滾是讓無人機往左傾斜飛行。
|

Step 3:
| Pitch俯仰
俯仰是是無人機向前和向後傾斜。正向俯仰是往前傾斜飛行,而負向俯仰是往後傾斜飛行。
|

Step 4:
| Yaw偏航
偏航是無人機的左右旋轉。正向偏航會將無人機向右轉,而負向偏航是將無人機向左旋轉。
|

Step 5:
| 油門催收
油門催收是無人機垂直上升或下降移動。催油門可以讓無人機往上飛高,而收油門可以讓無人機下降飛低。
|

Step 6:
| 使用遙控器
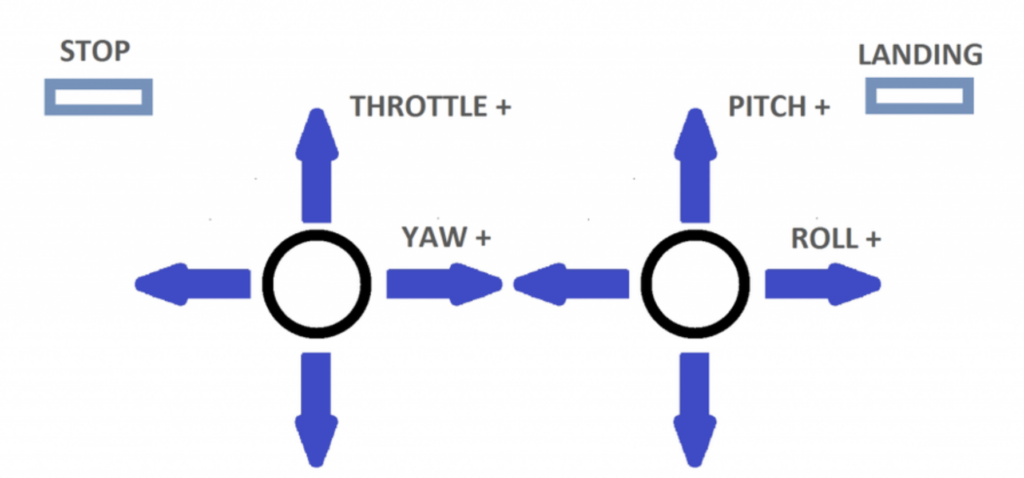
如果你上傳了預設飛行控制,以下是你會使用到的飛行指令:
專業提示:添加蜂鳴器命令,讓你可以在使用紅外線感測器時聽到聲音!
|
Arduino (Getting started)_ Maintenance 保養維護
Step 1:
| 影片教學
操作CoDrone遇到問題了嗎?請觀看以下影片或許能為你解決問題! 影片 |
Step 2:
| Battery 電池
CoDrone 使用 3.7V、300mAH、15c 鋰離子聚合物 (LiPo) 電池。 將CoDrone電池放入充電器中再連接上USB插孔來充電。如果電池正在充電中或未充飽電的狀態,充電器會亮2個LED紅燈,如果充飽電了LED燈會熄滅。 維護 按照以下規範做就可以讓電池壽命延長!
|

Step 3:
| 螺旋槳
CoDrone有4副螺旋槳,其中兩副順時鐘旋轉,另外兩副逆時鐘旋轉。 此設計是基於一種物理行為稱做陀螺進動。兩組相反的馬達運作相抵掉對方的淨扭力。如果所有螺旋槳都轉同一個方向,無人機會一直維持偏航。如果你的無人機起飛時稍微朝一邊傾斜很有可能你的螺旋槳有以上提到的狀況。 維護
更換螺旋槳 CoDrone螺旋槳擁有能輕易拆卸、清潔與更換的設計。
以下小提示請記得螺旋槳方向:其例如中一個螺旋槳護罩指向逆時針方向,因此右上方的馬達應安裝逆時針螺旋槳。
|

Step 4:
| 馬達
CoDrone使用的是電壓控制的雙向DC直流馬達。DC馬達在高電壓下運作快,反之,在低電壓下運作較慢,而在負壓下會相反運作。 維護: CoDrone 馬達很容易從主機上拆下—只需(輕輕地)將它們拉下來! 請經常檢查馬達以清除障礙物或堆積的灰塵。
|
Step 5:
| 主體
CoDrone主體裝有許多感測器與電路。請好好維護它才不會傷害當中任何組件。 維護:
|
Arduino (Getting started)_ Calibrating Codrone 校正Codrone
Step 1:
| 影片教學
如果你需要校正你的CoDrone,請觀看以下影片並仔細小心按照步驟操作! 還要確保你在一個平坦、寬敞且光線充足的區域,否則 CoDrone 可能無法正確校正,因為在技術層面上,你的 CoDrone 有兩個傳感器,它會與陀螺儀和加速度計一起使用,以確定它是否在駕駛,故要給其理想的區域以利於校正。
YouTube Video: YouTube 影片: |
