當被遺棄的物品有了新生命,就像雨天有了一絲陽光
上篇文章中我們幫助菜籃君長出了翅膀,這次工程團隊就要讓菜籃君飛向天空!在正式飛行之前,我們還是需要堅持飛安問題,整理一下內部讓前後的重量保持平衡,以不至於在起飛時容易偏斜或自旋,整理完之後是不是變得乾淨了許多了呢!
給它一點性格,加上一些知識的魔法及工程的計算
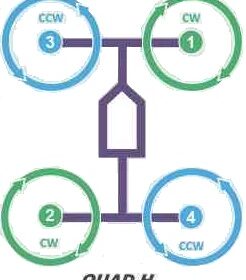
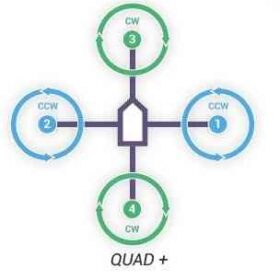
我們採用飛控核心 Pixhawk 對應的Mission Planner來安裝韌體以及設定基礎硬體設備,首先需要先來選擇多旋翼飛行器的形式,在上一篇文章中有提到菜籃君的長寬並不是 1:1 的正方形而是長方形,所以在飛行器結構上我們選擇較符合菜籃情況的H型。配合H型的飛行結構,馬達也須要做一些適度的調整才能有正常的升力讓菜籃君浮空,如下圖所示,我們可以觀察到X型和H型馬達的旋轉方向是不一樣的,H型的機構兩側馬達需要向左右兩邊內旋才會提供足夠的升力,並且在馬達的電子變速器連接RF接收器時,需要按照下圖的順序連接,不然就有可能會發生像是想要舉手卻把腳抬起來的慘劇哦~
人要行的正,坐得端;菜籃君要飛的正,就要校正。
接下來做加速度校正,加速度校正時必須要確實使用水平儀來校正,在飛行時菜籃才能有好的飛行姿態,尤其是在沒有GPS輔助的情況下更是如此,在沒有GPS輔助定位的情況下,只能靠手動調整飛機的姿態,如果加速度校正沒有確實完成的話,在操作時必定會是人有一種事倍功半的感覺;Left , Right, Up, Down, Back 必須確實做到,不然飛上天失控可就欲哭無淚了~
再來要做的就是陀螺儀校正,在做陀螺儀校正的時候,將機首當成箭頭分別對向上、下、左、右、前、後六個方位做搖晃的動作,讓系統可以採集最多及大範圍的取樣點,當取樣點夠多組成一個飽滿的球型時,羅盤校正就成功囉!
內涵與智慧是經過歷練所累積的;而遙控器調教也一樣
接著,我們將菜籃君通上電之後打開遙控器,開始執行遙控器調教,在這步驟上可以將遙控器上的各個開關把手的輸出通道最大及最小值是否正常,一般來說1000~2000間算是正常數值。最後需要設定的就是飛行模式,一般模式下我們可以設定為Stabilize自穩模式,此外為了操作方便還可設定AltHold以及Loiter兩個模式,AltHold可以讓飛行器保持在一樣的高度,Loiter則可以在有GPS信號時做到位置的保持。


解鎖;菜籃君愛の飛上天
調整完以上的步驟,團隊準備嘗試解鎖,雖然在第一次的嘗試時失敗了,但在重新校正及調整菜籃君的狀態之後,終於通過安全檢查成功解鎖了!另外需要注意的是,由於馬達支架是自行裁切的,難免會有一些歪斜,在起飛時需要先仔細確認四顆馬達是不是水平對稱的,不然起飛之後受力不均可能會摔斷一~兩根槳或嚴重的飛安問題哦~
現在就來讓我們看看菜籃君第一次愛の飛行進行得怎麼樣吧!
